Гидродинамический расчет
Из анализа Таблиц 10 и 11 можно сделать вывод, что при скорости буксировки 1 узел можно использовать один углубитель, при двух - два, а на скоростях 3 узла – три углубителя.
А если в схеме буксировки применить три увеличенных углубителя ( Таблица 11), то длина забортной части буксира не будет больше 900м, а общее конечное натяжение буксира будет меньше допустимого при коэффициенте запаса прочности n=2.
На основе анализа результатов всех расчетов можно рекомендовать этот вариант забортной части ГБО.
Длина кабеля КГА-17 950 – 1000м, три углубителя габаритами 1000*1000*150 мм и массой по 30кг каждый.
Циркуляция гидролокатора бокового обзора
Обследование поверхности морского дна при помощи ГБО производится параллельными галсами. При повороте судна-буксировщика на обратный галс или при переходе с одной линии галса на другую изменяется углубление БС. При маневрах судна необходимо применять специальные меры для обеспечения заданного отстояния носителя от грунта и даже для предотвращения касания носителя дна.
В связи с этим весьма важен выбор способа осуществлении маневра, траектории судна-буксировщика, скорости его на траектории и скорости выборки и вытравливания кабеля лебедкой. Оптимальный вариант маневра зависит от характеристик судна, забортной части системы цели маневра, гидрометеоусловий, навигационного обеспечения. Математической модели для исследования характера движения подводной буксируемой системы с учетом этих требований пока не создано. Можно рассмотреть отдельные периоды маневра судна-буксировщика с системой: изменение углубления системы на галсе при изменении скорости движения, зависимость углубления от параметров циркуляции, поведение системы при выборке и вытравливании кабеля лебедкой.
Поведение буксируемой системы на циркуляции можно анализировать на основе уравнений равновесия гибкой связи при циркуляции. Система дифференциальных уравнений установившегося движения гибкой связи (кабеля) в проекциях на оси системы координат имеет вид:
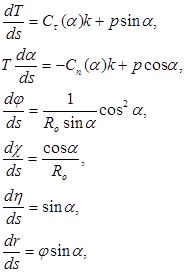
где, кроме принятых ранее обозначений, обозначено:
![]() -угол бокового наклона элемента кабеля;
-угол бокового наклона элемента кабеля;
![]() -угол поворота скорости набегающего потока на кабель при циркуляции;
-угол поворота скорости набегающего потока на кабель при циркуляции;
![]() - координата элемента кабеля по вертикали;
- координата элемента кабеля по вертикали;
![]() - радиус циркуляции ходового конца кабеля
- радиус циркуляции ходового конца кабеля
![]() -приращение радиуса циркуляции в текущей точке.
-приращение радиуса циркуляции в текущей точке.
Интегрирование дифференциальных уравнений равновесия кабеля на циркуляции так же целесообразно производить с использованием приложения Simulink математического пакета Matlab. На рис18. приведена S-модель этих уравнений.
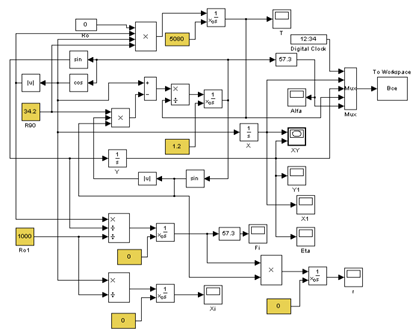
Рис №18. S-моделб решения уровнений циркуляций.
В качестве исходных данных при решении уравнений принимаются данные, полученные при расчете равновесия кабеля для прямолинейного движения. В качестве граничных условий при s=0 принимаем:
![]() .
.
Были рассчитаны параметры циркуляции для трех вариантов схем буксировки при различных исходных данных.
1.схема с одним углубителем при глубине H=100м и скорости буксировки V=3 узла;
2.схема с двумя углубителями H=200м и V=3узла;
3. схема с тремя углубителями H=300м и V=3узла.
1 вариант.
Исходные данные: натяжение кабеля T=`1750 н, длина кабеля L=235 м, радиус циркуляции R=500, 600, 750 м
Расчеты показали, что при этих данных на циркуляции происходит увеличение углубления устройства на 14м.
2 вариант.
Исходные данные: T=3540 н, L=470 м, радиус циркуляции R=600, 750, 1000 м. В этом случае увеличение углубления устройства на было на 18м.
3 вариант.
Исходные данные: T=`5080 н, L=740 м, радиус циркуляции R=1000 м.
Увеличение углубления устройства в этом случае было на 29м.
Таким образом, для того чтобы исключить задевание ГБО за дно при повороте судна-буксировщика на новый галс необходимо предварительно уменьшить глубину хода системы.
![]() Основным методом регулирования глубины неуправляемого носителя ГБО является выборка или вытравливание кабеля лебедкой. Анализ этого процесса можно провести, используя линейные дифференциальные уравнения динамики движения подводной буксируемой системы. В нашем случае достаточно уравнений продольного движения. Эти уравнения имеют вид.
Основным методом регулирования глубины неуправляемого носителя ГБО является выборка или вытравливание кабеля лебедкой. Анализ этого процесса можно провести, используя линейные дифференциальные уравнения динамики движения подводной буксируемой системы. В нашем случае достаточно уравнений продольного движения. Эти уравнения имеют вид.
Популярное на сайте:
Гидропневматичекий амортизатор подвески автомобиля
Гидропневматический амортизатор подвески автомобиля, по авт. св. №119804, содержащий гидравлический цилиндр и соединенный с бесштоковой полостью гидроцилиндра дроссельным отверстием гидрогазовый аккумулятор, отличающийся тем, что, с целью повышения надежности работы в процессе движения автомобилей ...
Характеристика всех путей
сообщения, протяженность, состояние, динамика развития, условия движения
В Карталинском муниципальном районе протяженность областных автомобильных дорог общего пользования регионального и межмуниципального значения, являющихся собственностью Челябинской области, составляет 334,2 км. В черте г. Карталы протяженность дорог и проездов 176,8 км, в том числе: -маршруты город ...
Расчет затрат в ремонтный фонд
Потребность в запасных частях и материалах невозможно рассчитать в натуральном выражении, т.к. в настоящее время номенклатура запасных частей, агрегатов и материалов для осуществления ТО и ремонта подвижного состава насчитывает более 500 наименований. В связи с этим расчет производят в стоимостном ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт