Гидродинамический расчет
Коэффициенты уравнений обычно называют динамическими коэффициентами. Величины, входящие в эти коэффициенты, определяют важные динамические свойства системы носитель ГБО-буксир. Исходными данными для определения динамических коэффициентов служат конструктивные и геометрические параметры аппарата и буксира, их гидродинамические характеристики. Эти параметры определяются из расчетов равновесия углубителя и буксира.
Определение исходных данных
Принятый за основу углубитель (Рис №10,11,12,13…) представляет собой крыло малого удлинения гидродинамические характеристики его определяются по [ Виноградов Н. И., и др. Привязные подводные системы. Прикладные задачи статики и динамики. СПб: Изд-во С.-Петерб. ун-та, 2000. …] и [ Черепанов Б. Е. Судовые механизмы. Москва. Пищевая промышленность, 1976.].
![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
По [ ] определяются присоединенные массы.
![]()
![]() ,
, ![]() .
.
Расчет коэффициентов уравнений ![]() ,
, ![]() , для 1 варианта схемы буксировки приведены в Приложении. Решение уравнений динамики целесообразно производить с использованием приложения SimuLink пакета MATLAB. На рис.19 приведена S-модель этих уравнений. Эта S-модель в основном используется для анализа управляемого движения буксируемых аппаратов и исследования воздействия различных возмущений на поведение аппаратов. Анализ динамики процессов выборки и травления буксира можно произвести вводом дополнительных блоков имитирующих изменение натяжения кабеля при изменении длины кабеля. Так как используется линейная модель динамики буксируемой системы, то в дальнейшем будет рассматриваться только выборка кабеля.
, для 1 варианта схемы буксировки приведены в Приложении. Решение уравнений динамики целесообразно производить с использованием приложения SimuLink пакета MATLAB. На рис.19 приведена S-модель этих уравнений. Эта S-модель в основном используется для анализа управляемого движения буксируемых аппаратов и исследования воздействия различных возмущений на поведение аппаратов. Анализ динамики процессов выборки и травления буксира можно произвести вводом дополнительных блоков имитирующих изменение натяжения кабеля при изменении длины кабеля. Так как используется линейная модель динамики буксируемой системы, то в дальнейшем будет рассматриваться только выборка кабеля.
На Рис.19 показана схема набора, имитирующая составляющие Fx и Fy приращения силы, возникающие в кабеле при выборке.
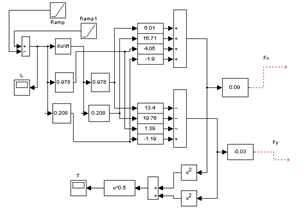
Рис.№19. S-модель состовляющих сил Fx и Fy при выборке кабеля.
На блоке Ramp 1 устанавливается скорость выборки кабеля, на блоке Ramp-время выборки, включая блоки с разными знаками, фиксируем определенную длину выбранного кабеля. Дифференцирующий блок создает сигнал пропорциональный скорости выборки кабеля.
На блоках масштабирования, подключенным к сумматорам устанавливаются значения производных натяжения кабеля на коренном конце по скоростям и перемещениям этого конца.
На регистраторах L и T можно видеть выбранную длину кабеля и приращение натяжения при выборке.
Полная схема решения уравнений приведена на Рис 20
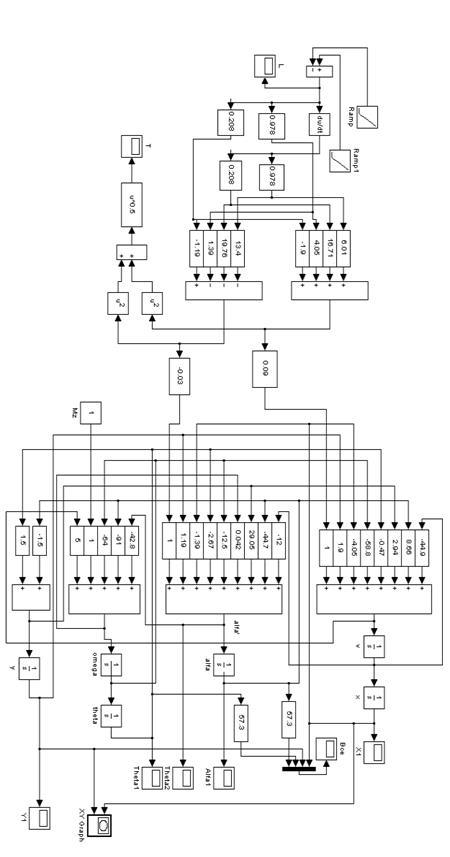
Рис.№20. S-модель решений уровнений динамики системы при выборке кабеля.
Были проанализированы процессы выборки кабеля для трех, ранее указанных вариантов схем буксировки и скорости буксировки 3 узла.
1вариант.
Для этого варианта необходимо перед переходом судна на другой галс или на циркуляцию уменьшить глубину хода ГБО на14м.
Расчет выборки производился для 2-х скоростей выбирания кабеля 1м/c , время включения лебедки варьировалось от 10сек до100сек.
Оказалось, что необходимые 14м можно получить при скорости выборки 1м/c и времени выборки 60 сек. Переходной процесс ГБО по глубине показан на Рис .Увеличение натяжения кабеля при этом 460н.
2 вариант.
Для этого варианта необходимо перед маневрированием судна уменьшить глубину хода на18м. Моделирование показало, что этот результат можно получить при скорости выборки 1м/с и времени включения 80 сек, время достижения заданной глубины 200 сек, хотя весь переходной процесс длится 250 сек. Увеличение натяжения кабеля при этом 330 н. Переходной процесс этого варианта показан на Рис
3 вариант.
Необходимое изменение глубины 29 м в это случае можно достичь при скорости 1 м/с и времени выборки 140 сек, время достижения 300 сек, а время переходного процесса более400сек. Увеличения натяжения кабеля 350 н. Переходной процесс этого варианта показан на Рис
Популярное на сайте:
Характеристика АТП
Предприятие, для которого я планирую зону ТО-1, находится в городе Новосибирске и на нем работает 131 автомобиль. Из них ГАЗ 3102-21 автомобилей и РАФ 2203-110 автомобилей. Эти автомобили они работают 365 дней в году, в 1 смену и находятся в на линии по 8 часов. Среднесуточный пробег составляет Lcр ...
Расчет показателей пассажирских перевозок в пригородном сообщении
Как и для дальнего и местного пассажирского движения, для пригородных перевозок рассчитываются следующие основные количественные и качественные показатели: 1). Количество перевезенных пассажиров: , (2.6) где - число раздельных пунктов, на которых производится посадка пассажиров, следующих в одном н ...
Годовой объем работ по
самообслуживанию предприятия
Согласно Положению, кроме работ по ТО и ТР, в АТП выполняются вспомогательные работы, объем которых (Твсп) составляет 20-30% от общего объема работ по ТО и ТР подвижного состава. В состав вспомогательных работ входят работы по самообслуживанию предприятия (обслуживание и ремонт технологического обо ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт