Устойчивость вагона
Оценка устойчивости колесной пары от вползания на головку рельса.
Устойчивость колеса против схода с рельса оценивают в зависимости от скорости движения и от угла наклона рабочей грани гребня
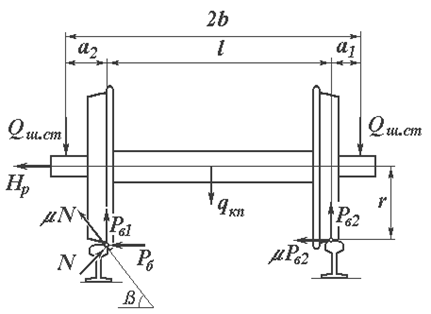
Рисунок 8.1.1.-Расчетная схема нагрузок, действующих на колесную пару
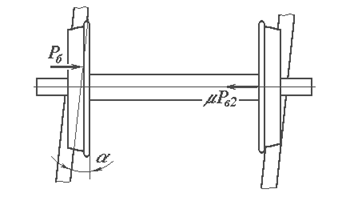
Рисунок 8.1.2.-Положение колесной пары при набегании колеса на рельс с учетом действующих сил
![]() -радиус колеса в плоскости круга катания, м
-радиус колеса в плоскости круга катания, м
![]() -расстояние между серединами шеек колесных пар, м
-расстояние между серединами шеек колесных пар, м
![]() -расстояние между точками контакта колес с рельсами, м
-расстояние между точками контакта колес с рельсами, м
![]() -расстояние от точек контакта до середин шеек, м
-расстояние от точек контакта до середин шеек, м
![]()
![]()
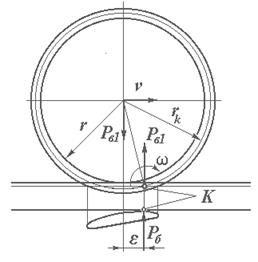
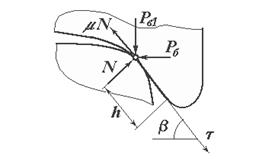
Рисунок 8.1.3.-Схема сил, действующих в точке контакта рабочих граней колеса и рельса
![]() -количество осей вагона
-количество осей вагона
![]() -вес груза, помещенного в вагон, Н
-вес груза, помещенного в вагон, Н
![]() -вес тары вагона, Н
-вес тары вагона, Н
![]() -вес тары двухосной тележки, Н
-вес тары двухосной тележки, Н
![]() -масса тары надрессорной балки, Н
-масса тары надрессорной балки, Н
![]() -вертикальная жесткость рессорного подвешивания одного комплекта, Н/м
-вертикальная жесткость рессорного подвешивания одного комплекта, Н/м
![]() -вес колесной пары, Н
-вес колесной пары, Н
Для гружёного вагона
Статический прогиб рессорного подвешивания, м
![]() (8.1)
(8.1)
![]()
Статическая нагрузка на шейку оси колесной пары, Н
![]() (8.2)
(8.2)
![]()
Реальная осевая нагрузка, Н
![]() (8.3)
(8.3)
![]()
Количество осей тележки (под одним концом вагона)
![]()
Для вычисления коэффициента вертикальной динамики необходимо задаться значением коэффициента ![]() для необрессоренных частей тележки.
для необрессоренных частей тележки.
![]()
Коэффициент b, зависящий от осности тележки
![]() (8.4)
(8.4)
Скорость движения вагона, м/с
![]()
![]()
![]() м/с (8.5)
м/с (8.5)
![]()
![]() м/с (8.6)
м/с (8.6)
 (8.7)
(8.7)
Распределение коэффициента вертикальной динамики между вертикальными колебаниями и боковой качкой
Популярное на сайте:
Требования к судам, перевозящим рефрижераторные контейнеры
Суда, предназначенные для перевозки рефрижераторных контейнеров, должны отвечать требованиям, изложенным в РД 31.11.21.18-96. Кроме того: - в составе экипажа судна должны быть квалифицированные специалисты для обслуживания работающих механизмов рефрижераторных контейнеров и поддержания в них требуе ...
Грузо-пассажирские перевозки
Транспорт образно называют “кровеносной системой” хозяйства. С его помощью осуществляется перемещение огромных масс грузов и пассажиров как внутри городов, так и в междугородном, межрайонном и международном сообщениях. Надежные транспортные связи являются необходимым и обязательным условием специал ...
Схема кольцевой езды
В;Д – основное депо А;Б;Г;Е – оборотные депо Участки работы локомотивных бригад. Lобр = 2L Способ обслуживания поездов локомотивами, выбор длины тяговых плеч и участков обращения оказывают большое влияние на технико-экономические и эксплуатационные показатели работы дороги, депо (среднесуточный про ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт