Гидродинамический расчет
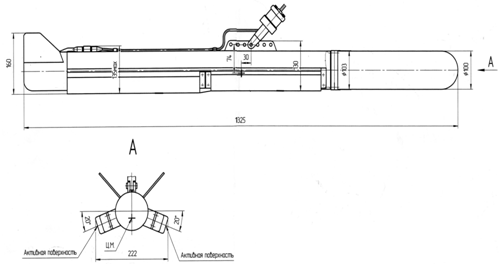
Рис №14. Гидролокатор бокового обзора.
Расчет равновесия БС
Гидролокаторы бокового обзора, используемые для морских исследований, являются подводными буксируемыми системами (БС). Для обеспечения их буксировки на определенной глубине необходимо заглубляющее устройство-углубитель (депрессор).
Компоновка схемы забортной части гидролокатора может быть различной. Иногда вся необходимая аппаратура и заглубляющее устройство располагаются в одном корпусе. Это чаще всего делается, когда в носителе кроме основного модуля локатора должна располагаться еще другая аппаратура устройства. Например, гидролокатор бокового обзора (ГБО) - искатель морских донных мин. В его носителе кроме основной аппаратуры расположены: система обозначения, система автоматического управления по глубине др. Если ГБО используется только для обследования дна, то БС может представлять собой модульную конструкцию, когда основной носитель аппаратуры это отдельный модуль, а углубитель и другие части БС могут быть отдельными элементами. Такая конструкция обеспечивает возможность применения ГБО в различных комбинациях в зависимости от условий работы (различные глубины, скорости буксировки, различные суда-буксировщики). В этом случае дополнительные элементы забортной части могут быть различными.
Определяющим элементом общей конструкции забортной части ГБО является кабель. Диаметр и прочностные характеристики его определяют размеры углубителя, скорость буксировки и максимальную глубину использования ГБО.
Для заглубления различных буксируемых устройств используются статические и гидродинамические углубители. Углубляющая сила статических углубителей создается их отрицательной плавучестью. Недостатками их являются большой вес и значительная зависимость углубления буксируемого устройства от скорости буксировки, кроме того большой вес, что осложняет постановку и выборку.
В нашем случае представляется возможным использовать углубитель разработанный на кафедре (20) СПБГМТУ.
Размеры углубителя определяются из условия создания необходимого натяжения на ходовом конце буксира, которое в свою очередь зависит от диаметра буксирного троса (буксира), его длины и углубления. Кроме того, натяжение на коренном конце буксира не должно превышать принятое допустимое, которое принимается на основе разрывного усилия кабеля. Все параметры буксира определяются из уравнений равновесия гибкой нити в однородном потоке жидкости.
Целесообразно использовать дифференциальные уравнения равновесия, т.к. решение уравнений в таком виде позволяют учесть все характеристики кабеля (отрицательная или положительная плавучесть кабеля и особенности гидродинамической нагрузки).
Эти уравнения для кабеля расположенного в вертикальной плоскости имеют вид:
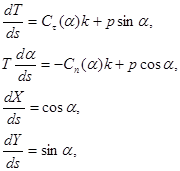
Где T-натяжение буксира,
s-дуговая координата (длина буксира),
![]() -угол атаки буксира,
-угол атаки буксира,
X, Y-координаты буксира,
p-удельная отрицательная плавучесть буксира,
![]()
коэффициенты составляющих гидродинамической нагрузки на элемент буксира.
![]() ,
,
![]() -плотность воды,
-плотность воды,
V-скорость буксировки,
D-диаметр буксира.
Интегрирование дифференциальных уравнений равновесия можно производить с использованием приложения Simulink математического пакета Matlab схема набора решений этих уровнений Рис №15.
Исходными данными для решения уравнений кроме указанных выше параметров являются:
![]() -начальное натяжение буксира,
-начальное натяжение буксира,
![]() -начальный угол буксира.
-начальный угол буксира.
Эти начальные параметры определяются через углубляющую силу, сопротивление и отрицательную плавучесть углубителя:
![]()
![]()
![]()
![]()
![]() -коэффициенты гидродинамического сопротивления и углубляющей силы углубителя соответственно,
-коэффициенты гидродинамического сопротивления и углубляющей силы углубителя соответственно,![]() -площадь несущих поверхностей (планеров) углубителя.
-площадь несущих поверхностей (планеров) углубителя.
Популярное на сайте:
Техника безопасности участка по ремонту ДВС
Для повышения знаний техники безопасности рабочим зачитываются инструкции по ТБ в следующем порядке: вновь прибывшему рабочему общий и вводный инструктаж и, соответственно, по предприятию в целом и по участку в частности, целевой инструктаж, касающийся рабочего места. Проводятся периодические прове ...
Механизация погрузочно-разгрузочных работ при перевозке грузов
Так как для перевозки контейнеров выбран Автомобиль-самопогрузчик КАМАЗ 4308 с краном-манипулятором PALFINGER. Выбор погрузочно-разгрузочной техники не требуется. Автомобили-самопогрузчики не требуют дополнительной техники на погрузку-выгрузку, поэтому и превосходят в данных операциях остальной под ...
Охрана труда и экология на пункте ТО-2
Безопасность движения на железнодорожном транспорте обеспечивается путём осуществления комплекса профилактических мер, которые предусматривают: Обобщать и повсеместно распространять положительный опыт предприятий, а также отдельных железнодорожников, работающих без нарушений безопасности движения п ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт