Расчет механизма подъема груза
Механизм подъема является приводным устройством для подъёма и опускания груза, функции которого на кране выполняет грузовая лебедка, установленная на конце поворотной платформы и состоящая из смонтированных на плите 16 (рисунок 2.10) гидромотора 10, двух ленточных тормозов 14, редуктора 1, барабана 7 и кронштейнов 9 и 11. На барабан лебедки, в связи с трехслойной навивкой каната , дополнительно устанавливаем прижимной ролик. Экспресс-доставка из Турции: Быстро, Надежно, Успешно
Барабан грузовой лебедки получает вращение от вала 2 редуктора через зубчатые полумуфты 3 и 5, причем первая жёстко соединена с барабаном 7. Опорами барабана являются подшипники 4, установленные на зубчатой полумуфте 5, которая насажена на вал 2 редуктора.
Передача крутящего момента от гидромотора, установленного на кронштейне 11, к редуктору осуществляется упругой муфтой со звездочкой 13. Тормозной шкив 15 установлен на быстроходном валу редуктора и является полумуфтой.
Управление механизмом подъёма производится рукояткой управления грузовой лебедкой в кабине крановщика.
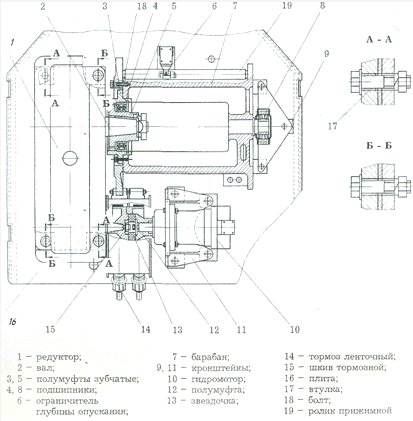
Рисунок 2.10 - Лебёдка
Расчёт механизма включает следующие этапы: выбор полиспаста (тип, кратность, схема запасовки), выбор принципиальной схемы механизма, расчёт и выбор каната, расчёт барабана и блоков, выбор гидромотора, выбор редуктора, выбор тормоза и муфты.
Для стреловых самоходных кранов, в основном, применяются одинарные полиспасты с навивкой на барабан одного конца каната (второй конец крепится в вершине стрелы или на крюковой подвеске).
Так как наибольший вес груза 66 кН, то выбираем кратность полиспаста ![]() =3. Схема запасовки грузового каната приведена на рисунке 2.11
=3. Схема запасовки грузового каната приведена на рисунке 2.11
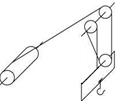
Рисунок 2.11 - Схема запасовки грузового каната
В стреловых и самоходных кранах с индивидуальным гидроприводом применяются лебедки с непосредственным соединением барабана с редуктором. П-образная схема грузовой лебедки представлена на рисунке 2.12.
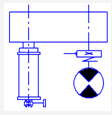
Рисунок 2.12 - Схема грузовой лебедки
Определяем максимальное натяжение каната при набегании на барабан /14/
![]()
где ![]() - вес груза, кН,
- вес груза, кН,
![]() - кратность грузового полиспаста ,
- кратность грузового полиспаста ,
![]() - КПД отклоняющих блоков.
- КПД отклоняющих блоков.
Найдем КПД канато-блочной системы
![]()
где z-число отклоняющих блоков.
Находим КПД полиспаста
![]()
 .
.
Находим КПД канато-блочной системы
![]() ,
,
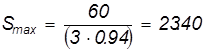 кН.
кН.
По разрывному усилию канат выбирается из условия
![]()
где![]()
![]() -коэффициент запаса прочности каната (
-коэффициент запаса прочности каната (![]() =5,5);
=5,5);
![]() -разрывное усилие в канате.
-разрывное усилие в канате.
![]() кН.
кН.
Выбираем канат двойной свивки типа ЛК-0 (![]() мм) конструкции
мм) конструкции ![]() о.с. (применительно к ГОСТ 3077-69). Разрывное усилие каната
о.с. (применительно к ГОСТ 3077-69). Разрывное усилие каната ![]() =129 кН, при маркировочной группе по временному сопротивлению разрыву σ=1800 МПа /11/.
=129 кН, при маркировочной группе по временному сопротивлению разрыву σ=1800 МПа /11/.
Популярное на сайте:
Диагностирование системы охлаждения автомобиля ВАЗ
2107
Проверка уровня и плотности жидкости в системе охлаждения: Правильность заправки системы охлаждения проверяется по уровню жидкости в расширительном бачке, который на холодном двигателе (при 15–20°С) должен находиться на 3–4 см выше метки "МIN", нанесенной на расширительном бачке. При необ ...
Реакция локомотивных устройств в заданных ситуациях
При наличии на блоке индикации локомотивов БИЛ сигнала «З» значение Vк равно скорости проследования путевого светофора сзеленым сигналом. Если разность скоростей в окнах Vк и Vф равна или меньше 5 км/час, на блоке БИЛ показание скорости в окне Vф переходит в мигающий режим, и включается звуковой си ...
Определение экономических выгод
Железные дороги в силу высокой доли затрат на инфраструктурную составляющую требуют крупных инвестиций на строительство, эксплуатацию и содержание. Каждая линия должна давать доход достаточный, чтобы покрывать расходы и, если она находится в частной собственности, обеспечивать владельцам приемлемую ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт