Гидравлический телескопический амортизатор подвески транспортного средства
Благодаря непосредственному соединению компенсационной камеры с каналом штока жидкость испытывает минимальное сопротивление и хорошо заполняет подпоршневую полость.
При ходе сжатия (шток входит в амортизатор) жидкость из подпоршневой полости вытесняется в надпоршневую полость через калиброванный канал (при малой скорости поршня) и через клапан 5 (при большой скорости поршня), а также в компенсационную камеру (в объеме входящего штока). Давлением жидкости тарелка 18 прижимается к седлу 17, и жидкость протекает через отверстия 20 внутрь корпуса 16, затем по каналам 21 и вытачке в днище попадает в компенсационную камеру.
Благодаря конусной форме внутренней поверхности 22 корпуса и наличию экрана 25 жидкость после дросселирования в отверстии 20 протекает в камеру с минимальными завихрениями и эмульсированием, чем снижает возможность возникновения кавитационных явлений.
Формула изобретения.
Гидравлический телескопический амортизатор подвески транспортного средства, содержащий рабочий цилиндр, крышку с уплотнением, закрывающую верхний конец цилиндра, установленный подвижно в цилиндре полый шток, на нижнем конце которого закреплен поршень, а на верхнем конце, проходящем через крышку, закреплена герметичная компенсационная камера, установленный в штоке впускной клапан в виде подпружиненной тарелки с дросселирующим отверстием, связывающий внутреннюю полость штока с полостью компенсационной камеры, отличающийся тем, что, с целью упрощения конструкции, уменьшения сопротивления при истечении жидкости и устранения кавитации, впускной клапан снабжен установленным в верхнем конце штока и выступающим в нижнюю часть компенсационной камеры полым корпусом, взаимодействующим с тарелкой впускного клапана нижним торцом, причем в стенке корпуса выполнены наклонные каналы, соединяющие полости корпуса через прорези в днище компенсационной камеры с ее внутренней полостью, в которой установлен экран, закрепленный на корпусе.
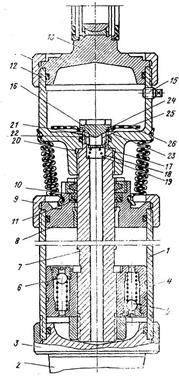
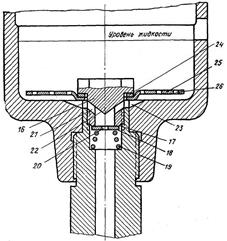 Рисунок 12. Гидравлический телескопический амортизатор продольный разрез
Рисунок 12. Гидравлический телескопический амортизатор продольный разрез
Рисунок 13. Компенсационная камера, разрез
Популярное на сайте:
История образования Карталинского района
История Карталинского края уникальна и уходит своими корнями в глубокую древность. Берега рек: Нижний Тогузак, Ольховка, Караталы-Аят, Сухая, Карагайлы-Аят были заселены родовыми общинами охотников и рыболовов еще в эпоху неолита. В последующем Карталинские степи стали местом кочевого скотоводства ...
Расчёт амортизационных отчислений по основным производственным фондам
Стоимость основных производственных фондов для автомобилей КамАЗ-532120 где Цавт. – цена автомобиля Кдост. - коэффициент, учитывающий расходы по доставке Асс – среднесписочное количество автомобилей 25 – доля стоимости ОПФ от стоимости подвижного состава (%) = 500000р. Кдост. = 1,07 = 90 ед. Стоимо ...
Управление транспортными системами
транспорт пассажирооборот грузооборот В зависимости от уровня сложности объектов и специфики решаемых ими задач можно разделить объекты управления транспортных систем на несколько уровней: - макроуровень – в масштабах экономики страны, региона; - уровень макрологистической системы; - уровень микрол ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт