Автономный управляемый катер с гидролокатором бокового обзора
Предназначен для поиска объектов, в том числе малоразмерных, на дне и в толще воды.

Рис.№5. Автономный управляемый катер с ГБО.
Устройство представляет собой радиоуправляемый малоразмерный катер с установленном на нем гидролокатором бокового обзора.
Катер обеспечивает высокоточные обследовательские и изыскательские работы в районах с предельно малыми глубинами и на больших акваториях. За счет малых габаритных размеров, манёвренности и компактного размещения навесного оборудования катер позволяет выполнять работы в условиях, когда применение буксируемых ГБО затруднительно или невозможно, например, в условиях портов, вблизи береговой линии, на глубинах меньше 10 метров, в условиях сложного (неизвестного) подводного рельефа. Катер оборудован забортной антенной бокового обзора, работающей в двух направлениях, приёмником GPS (DGPS) сигналов, устройством передачи данных в реальном времени по цифровому радиоканалу, не требующему разрешения на использование радиочастот. В процессе работы оператор в ручном режиме управляет движением катера или задаёт автоматические галсы.
Все данные с катера передаются на пульт оператора, в реальном режиме времени отображаются на экране и сохраняются в компьютере. Питание катера обеспечивается за счёт встроенных аккумуляторов, в комплект поставки входит два аккумулятора для обеспечения бесперебойной работы комплекса.
В отличие от обычных – буксируемых ГБО, катерный вариант позволяет свести к минимуму риски утери или ударов об дно буксируемого тела. Не требует использования дорогостоящей кабельной лебёдки, позволяет значительно уменьшить расходы на обеспечение съёмок, за счёт уменьшения количества обслуживающего персонала, отсутствия судна-носителя, малых массогабаритных размеров при транспортировке. В стандартный комплект поставки входят:
• катер с радиоканалом управления,
• пульт управления,
• антенна ГБО,
• альтиметр-эхолот,
• приёмник GPS,
• интерфейсы подключения дополнительного оборудования,
• программное обеспечение для передачи, сохранения и отработки данных. Дополнительно на катере может устанавливаться широкий спектр датчиков и навесного оборудования по требованиям заказчика.
Таблица №1. Основные технические характеристики
|
Рабочая частота ГБО |
400кГц |
|
Диапазон глубины для оптимального разрешения |
от 1 до 30 м |
|
Дальность действия |
до 150 м |
|
Скорость движения |
3,5 узла |
|
Дальность передачи данных |
1 км |
|
Автономность |
4-5 часов |
|
Вес катера |
50 кг |
|
Габаритные размеры катера |
1830 х 600 х 330 мм |
YellowFin - двухканальный гидролокатор бокового обзора с высокими характеристиками разрешения. YellowFin – доступная, простая в эксплуатации система, включающая скоростное Ethernet соединение с PC, имеющим Windows™. Имеет встроенные источник питания и GPS. Возможно, увеличение исследуемого объекта в окне без прерывания сбора данных в реальном времени. Данные выводятся на дисплей в реальном времени, с корректировкой скорости или без, в 9 цветовых таблицах по выбору
ПРИМЕНЕНИЕ: -Подводная археология -Поиск затонувших объектов -Подводная геология

Рис. №6. ГБО системы YellowFIN.
Особенности -Трёхчастотный -Высокое разрешение -В комплект входит 23 м кабеля -Максимальная глубина 300 м -Полоса обзора до 400 м -Встроенный GPS -Совместим с локальной сетью -Встроенный самописец -XTF конверсионная программа
Таблица №2 Технические характеристики:
|
Преобразователь Один преобразователь с каждой стороны, повернутый вниз на 20° Размеры луча 260 кГц: 2,2° х 75°; 330 кГц: 1,8° х 60°; 770 кГц: 0,7° х 30° Диапазон разрешения Диапазон шкалы - 1000 Макс. рабочая глубина 300 м Макс. длина кабеля 600 м Интерфейс Аналоговая телеметрия Питание 40 - 55 VDC, потребляет менее 3 Вт Размеры 114 мм (диаметр) х 833 мм (длина) |
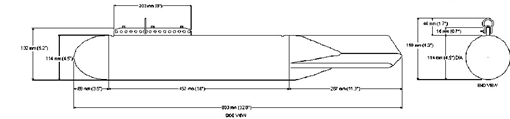
Рис.№7.Чертеж ГБО YellowFin
Tritech

Рис. №8.
Гидролокатор бокового обзора StarFish является одним из наиболее доступных приборов своего класса на рынке и предназначен для проведения обследований дна с небольших неподготовленных судов или лодок. Уникальная форма буксируемого тела обеспечивает непревзойденную стабильность при буксировке. Высокое качество получаемого изображения обеспечивается использованием частотной модуляции сигнала (CHIRP). Для работы гидролокатора достаточно подключить поверхностный блок к компьютеру. Питание может осуществляться как от сети переменного тока 110/220В, так и от источника постоянного тока напряжением 9-36 В, например аккумуляторной батареи.
Популярное на сайте:
Анализ материалов обследования
Анализ материалов обследования позволяет обоснованно осуществлять помаршрутное планирование работы автобусов и повысить эффективность их использования. При разработке помаршрутных планов строятся эпюры пассажиропотока по часам суток и по протяженности маршрутов. Колебания пассажиропотоков по часам ...
Проектирование контейнерного пункта
Контейнерный пункт состоит из следующих элементов: контейнерные площадки для среднетоннажных и крупнотоннажных контейнеров, число и длина которых принимается в соответствии с выполненными расчетами; рассчитанное число кранов; автопроезды, поворотные площадки и площадки для стоянки оборотных полупри ...
Автодорожная сеть
Занимая первое место в мире по площади своей территории, Россия по средней плотности автодорог уступает не только высокоразвитым, но и большинству развивающихся стран. Основу автодорожной сети России общей протяженностью 929 тыс. км (из них длина шоссейных дорог общего пользования - 574 тыс. км, ве ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт