Точность определения обстоятельств встречи и элементов движения судов
При обработке радиолокационных наблюдений следует иметь в виду, что обстоятельства встречи, курс и скорость цели определяются с погрешностями, которые в ряде случаев могут быть весьма значительными. Особенно важно учитывать вероятную погрешность в Dкр при оценке опасности столкновения.
Проведенные исследования показали, что при работе на шкалах среднего масштаба (15–16 миль) вследствие погрешности измерения пеленгов и дистанций относительное положение цели находится со средней квадратической погрешностью М≈0,6 кб. Если суммарную погрешность в двух относительных позициях цели отнести (точки 1 и 2 на рис. 2.3.) ко второму моменту наблюдения, можно считать, что второе относительное положение определено с суммарной погрешностью MΣ≈0,85 кб.
Погрешность в определении позиции цели в первую очередь приводит к погрешности определения Dкр (см рис. 2.3): σ Dкр= MΣ (1+tкр /ΔtH).
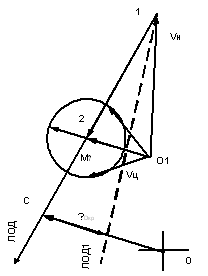
Рис. 2.3. Влияние погрешностей в позиции цели на радиолокационную прокладку
Погрешность в определении tKP зависит от отношения tKP/ΔtH и относительной скорости цели. Для встречных целей ![]()
Погрешность в определении курса цели зависит от ΔtH и скорости цели. Чем меньше скорость цели, тем больше погрешность в определении ее курса. Погрешность в определении скорости цели также зависит от ΔtH. Следует иметь в виду, что фактические погрешности в определении Кц и Vц будут больше вследствие погрешностей в курсе и скорости нашего судна.
Популярное на сайте:
Техническое обслуживание
устройств автоблокировки
Для технического обслуживания устройств СЦБ на каждой дороге организованы дистанции сигнализации и связи. Работы по техническому обслуживанию выполняют в соответствии с требованиями: Правил технической эксплуатации железных дорог; Инструкции по обеспечению безопасности движения поездов при производ ...
Яхта «Хозяин галактики»
Мегаяхта Galaxy - плод недавно заключённого альянса группы Azimut/Benetti с Fincantieri Yachting и первый проект, осуществлённый на новой верфи в Ливорно - задолго до завершения стала притягивать к себе внимание. Именитый производитель избрал настолько непривычные ультрасовременные материалы и так ...
Неисправности колесных пар
В процессе эксплуатации происходит естественный износ, в частности равномерный прокат обода колеса возникает в результате трения его о рельсы. Исправное содержание ходовых частей в эксплуатации обеспечивается периодическими видами ремонта (заводскими и деповскими), выполняемые в депо и на заводах, ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт