Расчет механизма изменения вылета
![]() мм - плечо.
мм - плечо.
Ветровые нагрузки
![]() , Н,
, Н,
где ![]() - площадь, воспринимающая давление ветра,
- площадь, воспринимающая давление ветра,![]() ;
;
![]() - распределенная ветровая нагрузка, Па.
- распределенная ветровая нагрузка, Па.
![]() ,
,![]() ,
,
![]()
![]() ,
,
![]() ), Па,
), Па,
где к=1 - экспериментально определяемый коэффициент возрастания динамического давления;
с=1,2 - коэффициент аэродинамической силы;
q=270 Па - динамическое давление;
В нормальных условиях эксплуатации для рабочего состояния крана применяют
![]()
![]() Па,
Па,
![]() H.
H.

Выбирается штоковый гидроцилиндр /11/.
Технические характеристики штокового гидроцилиндра:
- диаметр цилиндра D=220 мм,
- ход штока h=500 мм,
- расчётное усилие на штоке S=625 kH.
Определение расчетного (невыгоднейшего, т.е. соответствующего наибольшим напряжениям в опасном сечении) положения стрелы является самостоятельной и одной из главных задач при разработке математической модели. Для выявления расчетного положения стрелы (или, что то же самое, угла наклона оси стрелы к горизонту) необходимо в пределах диапазона изменения вылета от наименьшего до наибольшего рассмотреть несколько положений полностью выдвинутой стрелы, разбив диапазон изменения вылета на несколько равных частей. Внешние нагрузки, действующие на стрелу в общем случае в плоскости качания, представлены на рисунок 2.17 /20/

Рисунок 2.17 - Схема внешних сил, действующих на стрелу в плоскости качания:
Q - вес поднимаемого груза, кН; Sк - усилие в грузовом канате, кН; R - равнодействующая сила от веса поднимаемого груза Q и усилия в грузовом канате Sк, кН; N - сжимающее стрелу усилие, кН. Числами в кружках отмечены положения стрелы по вылету, причем положения 1 . 5 - рабочие положения; положение 6 - горизонтально расположенная стрела без груза, нагруженная только собственным весом секций, гидроцилиндра телескопирования и крюковой подвески; положение 7 - горизонтально расположенная стрела без груза, нагруженная только собственным весом секций и гидроцилиндром телескопирования.
Внешними нагрузками в данном случае являются суммарный вес поднимаемого груза и крюковой подвески Q и усилие в грузовом канате Sк. Собственным весом секций и весом гидроцилиндра телескопирования, а также сопротивлением в канато-блочной системе на данной стадии, как показали наши исследования, можно пренебречь ввиду их незначительного влияния на напряжённо-деформированное состояние, что существенно упрощает дальнейшие рассуждения. Вес поднимаемого груза величина переменная, определяемая по кривой грузоподъемности для каждого вылета (положения стрелы) и приводимая в паспорте крана. Например, для автомобильного крана
КС-35715 с наибольшей грузоподъёмностью 16 т зависимость веса поднимаемого груза от вылета при работе с полностью выдвинутой стрелой длиной 18 м дана на рисунке 2.18
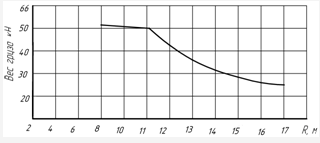
Рисунок 2.18 Зависимость веса поднимаемого груза от вылета крана
График зависимости сжимающего стрелу усилия от вылета представлен на рисунок 2.19
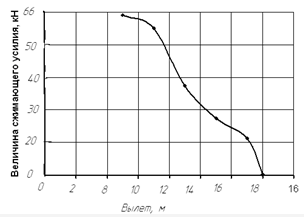
Рисунок 2.19 -.График зависимости сжимающего стрелу усилия от вылета
Определим расчетное положение трёхсекционной телескопической стрелы на примере автомобильного крана КС-35715. Кривая грузоподъемности для этого крана представлена на рисунке 2.19.
Усилие в стреловом канате рассчитывается по формуле /20/
![]() ,
,
где Q=66 кН - грузоподъемность крана на данном вылете;
m=3 - кратность грузового полиспаста.
Отсюда получаем
![]() кН.
кН.
Популярное на сайте:
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт