Расчет параметров математических моделей
Проверим правдоподобность по критерию Романовского:
![]() - гипотеза не отвергается.
- гипотеза не отвергается.
Расчет критерия Колмогорова.
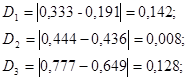
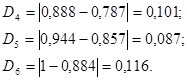
В каждом из интервалов определяем модуль разности между экспериментальными значениями интегральной функции F(xi)э и теоретическими F(xi), т.е.
![]()
и выбираем максимальное значение Dmax. Вычисляем расчетное значение критерия:
![]()
![]()
Таким образом, по критерию Колмогорова гипотеза не отвергается.
При выполнении данной работы были просчитаны законы распределения: Вейбулла, экспоненциальный и ![]() - распределение. Эти законы распределения отвергаются по всем критериям и однозначно не подходят к данному вариационному ряду.
- распределение. Эти законы распределения отвергаются по всем критериям и однозначно не подходят к данному вариационному ряду.
Выводы : В результате проделанных расчетов мы можем сделать вывод, что в нашем случае больше всего подходит нормальное распределение времени проверки состояния и крепления рулевых тяг автомобилей BMW. Мы это заключение сделали на основании рассчитанных критериев о принадлежности той или иной гипотезы. Выбранное распределение не отвергается не по одному из критериев и имеет наименьшее их значение:
- критерий Романовского: ![]()
- критерий Пирсона: ![]()
- критерий Колмогорова: ![]()
Популярное на сайте:
Режим плавания
У берегов Берингова моря, в отдельных бухтах и заливах, имеются районы: запретные для плавании; запретные для постановки на якорь, лова рыбы придонными орудиями лова, придонного траления, подводных и дноуглубительных работ, взрывных работ и плавания с вытравленной якорной цепью; затопленных взрывча ...
Эффективные показатели двигателя
Среднее давление механических потерь, Мпа где Ам и Вм - опытные коэффициенты. Принимаем такие значения: для бензиновых двигателей с числом цилиндров до 6 и с S/D<1 Ам = 0.039; Вм = 0.0132. νп.ср. – средняя скорость поршня, м/с Для четырехтактных бензиновых двигателей рм=0,14-0,25 МПа. Средн ...
Оформление актов о неисправностях, поломках и авариях
«Акт о техническом состоянии агрегатов» представлен на рис. 20, «Акт служебного расследовании выхода из строя агрегата» (см. рис. 21), образец «Акт на аварию» представлен на рис.22. Рис. 20. Акт о техническом состоянии агрегатов Рис. 21. Акт служебного расследования выхода из строя агрегата Рис.22. ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт