Тяговая характеристика автомобиля
Касательная сила тяги на ведущих колесах автомобиля определяется выражением
![]() (2.2)
(2.2)
Для движения автомобиля на первой передаче при скорости вращения коленчатого вала двигателя ![]() = 58,61 рад/с определяем значение касательной силы тяги на ведущих колесах
= 58,61 рад/с определяем значение касательной силы тяги на ведущих колесах
![]()
Для остальных значений угловой скорости вращения коленчатого вала двигателя и высших передач значения касательной силы тяги на ведущих колесах автомобиля рассчитываем аналогично, и результаты сводим в таблицу 1.1.
Сила сопротивления воздуха при движении автомобиля определяется выражением:
![]() (2.3)
(2.3)
где кв - коэффициент обтекаемости.
Для движения автомобиля со скоростью v = 1,08 м/с сила сопротивления воздуха равна
![]()
Для остальных значений угловой скорости и высших передач значения силы рассчитываем аналогично, и результаты сводим в таблицу 1.1.
Свободная сила тяги определяется выражением
![]() (2.4)
(2.4)
![]()
По полученным значениям Рт, Рв, Рс на рисунке 2.2 строится график зависимости Рт, Рв, Рс (V), называемый тяговой характеристикой автомобиля.
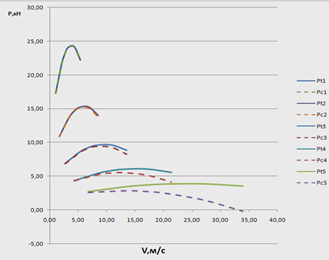
Рисунок 2.2 – Тяговая характеристика двигателя
Популярное на сайте:
Определение состава и расчет площадей СТО
Состав и площади по видам выполняемых услуг подразделяются: 1.Производственные: зона постовых работ, производственные участки. 2.Складские помещения. 3.Административно-бытовые 4.Технические помещения. 5.Помещения для обслуживания клиентов: клиентская, магазин. 6.Помещения для продажи автомобилей. 7 ...
Техническое обслуживание узла и его
составных частей
Техническое обслуживание рулевого управления заключается в основном в проверке его состояния, подтяжке креплений, регулировке зазора в рабочей паре редуктора рулевого механизма и затяжке подшипников. Основным показателем состояния рулевого управления является свободный ход (люфт) рулевого колеса. Б ...
Ориентировочный расчет валов редуктора
Исходные данные: , , . Расчет диаметров валов редуктора: , принимаем: . где:, [2] стр. 296 , принимаем: . , принимаем: . Разработка конструкции вала. Рассчитываем быстроходный вал: , где: , [3] стр. 25 , диаметр под подшипник принимаем . , где: , [3] стр. 25. , диаметр буртика под подшипник принима ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт