Расчет муфты, соединяющей электродвигатель с насосом
Для соединения насоса с электродвигателем применяется втулочно-пальцевая муфта (МУВП - 35) (смотреть рисунок 4.1).
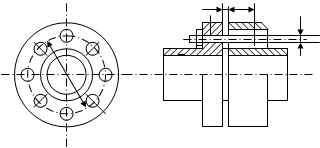
Рисунок 4.1.- Втулочно-пальцевая муфта
Условие прочности пальца на изгиб определяется по формуле [5].
Gu = (2·10³∙Тk ∙(0,5∙ln+С)) :Z∙Do∙dn³·0,1 ≤ [Gu], (4,1)
где Gu – наибольшее напряжение в опасном сечении пальца, МПа
Тk – расчетный момент, Нм
ln – длина пальцев, мм
С – зазор между полумуфтами, С = 3…5 мм [5]
Z – число пальцев, шт
Do – посадочный диаметр пальцев, мм
dn – диаметр пальца, мм
[Gu] – допускаемое напряжение изгиба, МПа
([Gu]= 80÷90 МПа) [5]
Расчетный момент находится по формуле [5]
Тр = Кр∙Т, (4.2)
где Кр – коэффициент режима работы, Кр = 1,3 [5]
Т – вращающийся момент, Нм
Т = N:ω, (4.3)
где N - мощность электродвигателя, Вт
ω – угловая скорость вращения, с−1;
Т = 5500:101= 54,45 Нм
Тк = 54,45·1,3= 70,78 Нм
Gu = (2·10³· 70,78(0,5·3,0+4)) :6·80·10³·0,1= 56 МПа ≤ [Gu] = 80 МПа
Расчет упругих элементов на снятие в предположении равномерного распределения нагрузки между пальцами [5]
Gu = (2·10³· Тк) :( Z∙dn∙lвт) ≤ [G]см, (4.4)
где lвт - длина втулки, [G]см – допустимое напряжение на смятие для резины, МПа ([G]см = 1,8…2,0 МПа) [5]
[G]см = (2·70,78): (0,08·6·0,01·0,03) = 0,8 МПа ≤ [G]см = 2,0 МПа
Расчет на прочность по допускаемым напряжениям [7]
Из условия равновесия определяем опорные реакции
Σ Мxa = -Rb∙l+g∙a∙l/2=0, (4.5)
где Σ Мxa – сумма моментов относительно опоры А
Rb – опорная реакция опоры В, Н
l – расстояние между опорами, Н
Rb = (g∙a): 2,(4.6)
где g – нагрузка на единицу дины, м/м
a – длина участка на который действует распределительная нагрузка.
Rb = (150 · 0,15) : 2 = 11,25 кН
Rа = Rb = 11,25 кН
Найдем максимальное значение изгибающего момента
Мизг max = (g∙a):4 · (l - а:2), (4.7)
Мизг max = (150 · 0,15):4 · (0,4 – 0,15:2)= 1,8 кНм
Построим эпюры поперечной силы Qх и изгибающего момента Мх. При построении эпюр Мх и Qх исходим их определений внутренних усилий и правил их знаков. На участке оси где нет внешних нагрузок, эпюры Мx и Qх линейные (причем прямая эпюры Q – параллельна нулевой линии этой эпюры), на участке где действует равномерно распределенная нагрузка, эпюра Мx - нелинейная – квадратичная парабола. При этом в сечении, где поперечная сила, изменяясь линейно, меняет знак, изгибающий момент достигает максимума.
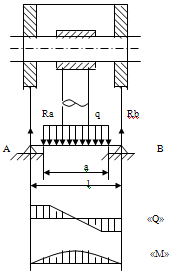
Рисунок 4.2. – Распределение сил на оси
При расчете на изгибаемых элементов по допускаемым напряжениям исходят из условия прочности по нормальным напряжениям [7]
Мmax : WZ ≤ [G], (4.8)
где WZ – момент сопротивления сечения относительно нейтральной оси, [G] – допускаемое напряжение при изгибе, МПа
[G] = 150 МПа – для СтЗ [7]
WZ = 0,1 d³, (4.9)
где d – диаметр оси, мм
WZ = 0,1 (0,52)³= 0,0140608 м³ = 14060,8 мм³
G = (1,8 ·10³ ·10³):14060,8=128 МПА ≤ [G]=150МПа
Популярное на сайте:
Учет стоимости грузов при сравнении перевозок по видам транспорта
Наряду со стоимостью парка вагонов и автомобилей следует учитывать изменение стоимости грузов, находящихся в процессе перевозки, по грузам, ускорение доставки которых создает возможность сокращения оборотных средств в народном хозяйстве. Для грузов, скорость доставки которых приводит к изменению об ...
Влияние климатических условий на эксплуатационную
производительность гидрофицированных машин
Применение гидрофицированных самоходных машин в северных районах сдерживается исключительно низкой эффективностью гидравлического привода в зимний период. Например, бульдозер не мог осуществлять планировку снега при температуре воздуха минус 24 °С, даже через час с момента пуска машины. Причинами э ...
Краткое описание устройства дизеля
Цилиндры дизеля установлены в стальном сварном блоке, имеющий 16 гнезд, расположенных в блоке в два ряда, под углом 45°. В комплект каждого цилиндра входят: крышки с клапанным механизмом, привернутой к ней втулка цилиндра, а также поршень с шатуном. Цилиндры, установленные в правом ряду, имеют глав ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт