Определение обстоятельств встречи и элементов движения целей
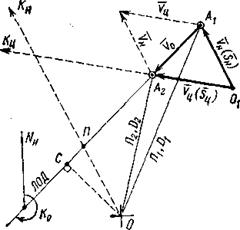
Рис. 2.2. Прокладка в относительном движении
При ведении прокладки в относительном движении также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме – точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную Vц до пересечения с ЛОД.) Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения место положения эхо-сигнала в точке А2 промежутка времени tпер:
![]()
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т.е. DKP и tKP, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух перемещений – относительного ![]() и нашего судна
и нашего судна![]() или
или ![]()
Учитывая коммутативность суммы векторов ![]() можно находить
можно находить![]() двумя способами.
двумя способами.
Построение векторного треугольника (см. рис 2.2), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
Прокладка в относительном движении выполняется на радиолокационном маневренном планшете, представляющем собой сетку полярных координат. Для ускорения расчетов, связанных с плаванием судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала.
Популярное на сайте:
Рихтовочные работы
Благодаря рихтовке деформированных поверхностей кузова они приобретают первоначальную форму. Рихтовка должна снимать внутренние напряжения, возникающие вследствие деформации кузова. Кроме того, в процессе рихтовки не должны образовываться новые зоны растяжения и сжатия. Исходя из этого, техника, ис ...
Обоснование конструкции и параметров рамы крановой установки и опорных узлов
Предлагаемая конструкция крановой установки рисунок 2.20 состоит из рамы, на которой жёстко закреплена стрела проушиной, гидроцилиндра, который служит для подъёма и опускания стрелы, лебедки, предназначенной для подъема и опускания груза, крюковой обоймы и лыжи. Рисунок 2.20 - Крановая установка: 1 ...
Подбор технологического оборудования и организационной оснастки
К технологическому оборудованию относят стационарные, передвижные и переносные стенды, станки, всевозможные приборы приспособления, производственный инвентарь, необходимые для выполнения работ по ТО-2 и диагностированию подвижного состава. В большинстве случаев оборудование, необходимое по технолог ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт