Физические процессы при функционирование ГБО
Физические процессы, происходящие при обследовании грунта и обнаружении объектов поиска, схематично представлены на рис.3. Носитель H гидролокатора бокового обзора буксируется со скоростью Vв на расстоянии h от поверхности грунта, просматривая дно зондирующими посылками (рис.3 а).
На антенну А, размещенную на носителе, периодически подаются импульсы переменного тока длительностью I, в течение которых поверхность антенны совершает механические колебания. Разряжения и сжатия, возникающие в воде у поверхности антенны, распространяются в виде пакета акустических волн-посылки, которая концентрируется внутри области, определяемой характеристикой направленности антенны. Протяженность посылки равна произведению СI, где С - скорость распространения акустических волн в воде.
Дойдя до грунта, посылка "высвечивает" на его поверхности акустический блик, который движется вдоль полосы обнаружения, воздействия на грунт и объект поиска ОП и вызывая эхо-сигналы от них, которые возвращаются к антенне и преобразуются в электрические сигналы. Эхо-сигналы от объектов поиска вызывают электрические сигналы ЭС большего напряжения, чем эхо-сигналы от грунта, вызванные донной реверберацией ДР . За объектом поиска образуется зона тени Т, внутри которой грунт акустическими волнами не возбуждается и где эхо-сигналы отсутствуют. Изменение напряжения эхо-сигналов в функции времени ![]() приведено на графике рис.3 б. Здесь время есть отношение пути, пройденного посылкой и эхо-сигналом, к скорости звука в воде. Напряжение эхо-сигналов донной реверберации ДР с ростом t падает по причине затухания акустических волн с увеличением расстояния до антенны и уменьшением угла скольжения акустического луча. Однако это падение может быть исключено путем автоматического изменения во времени коэффициента усиления в тракте обработки информации. Такая операция носит название стационаризации эхо-сигналов.
приведено на графике рис.3 б. Здесь время есть отношение пути, пройденного посылкой и эхо-сигналом, к скорости звука в воде. Напряжение эхо-сигналов донной реверберации ДР с ростом t падает по причине затухания акустических волн с увеличением расстояния до антенны и уменьшением угла скольжения акустического луча. Однако это падение может быть исключено путем автоматического изменения во времени коэффициента усиления в тракте обработки информации. Такая операция носит название стационаризации эхо-сигналов.
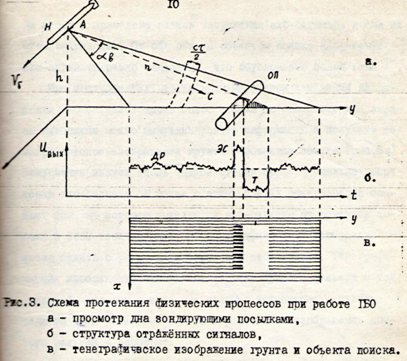
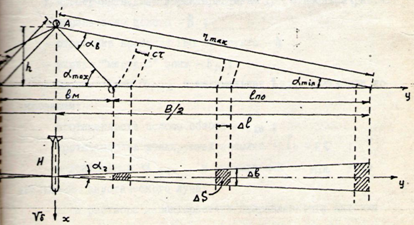
Рис.№4. Пространственные характеристики ГБО
На рис.3 б приведена запись напряжения эхо-сигналов после их стационаризации. От области за объектом поиска напряжение эхо-сигналов резко снижается, что обусловлено зоной тени Т . При последовательной во времени записи изменений напряжения эхо-сигналов вдоль полос поиска на самописце или экране кинескопа можно визуализировать информацию и получить тенеграфическое изображение грунта и объектов поиска (рис. Зв). Почернение записи вдоль каждой строки пропорционально напряжению эхо-сигнала. В связи с этим, донная реверберация создает фон, на котором выделяются эхо-сигналы от объектов поиска и зоны тени за ними. По тенеграфическому изображению можно судить о размерах и форме объектов поиска. Тенеграфические изображения напоминают картины лунного рельефа с той разницей, что там освещенные солнцем возвышения - светлые, а тени за ними - темные, а в тенеграфического изображении донного рельефа - наоборот.
Популярное на сайте:
Расчет и построение внешней скоростной характеристики двигателя
С некоторой долей погрешности внешняя скоростная характеристика может быть определена и построена для четырехтактных двигателей с искровым зажиганием на основании следующих данных: Табл.1: Внешне скоростные характеристики автомобиля УАЗ-452 п, % 20 40 60 80 100 120 п, мин-1 800 1600 2400 3200 4000 ...
Проектирование контейнерного пункта
Контейнерный пункт состоит из следующих элементов: контейнерные площадки для среднетоннажных и крупнотоннажных контейнеров, число и длина которых принимается в соответствии с выполненными расчетами; рассчитанное число кранов; автопроезды, поворотные площадки и площадки для стоянки оборотных полупри ...
Технологический маршрут обработки и выбор типа оборудования, приспособления
и инструмента
Операции технологического процесса 000. Заготовительная. 005. Токарная. Подрезать торец, сверлить и зенкеровать отверстие, обточить фаску. 010. Токарная. Обточить поверхности, подрезать торцы, обточить фаску, обточить канавки. 015. Токарная. Расточить фаску, расточить канавки. 020. Сверлильная. 025 ...
Главное меню
- Главная
- Обслуживание и ремонт электровозов
- Транспортная система России
- Понятие транспорта
- Техническое обслуживание и ремонт автомобилей
- Перевозки железнодорожным транспортом
- Работа автотранспортного предприятия
- Современный транспорт